OVERVIEW
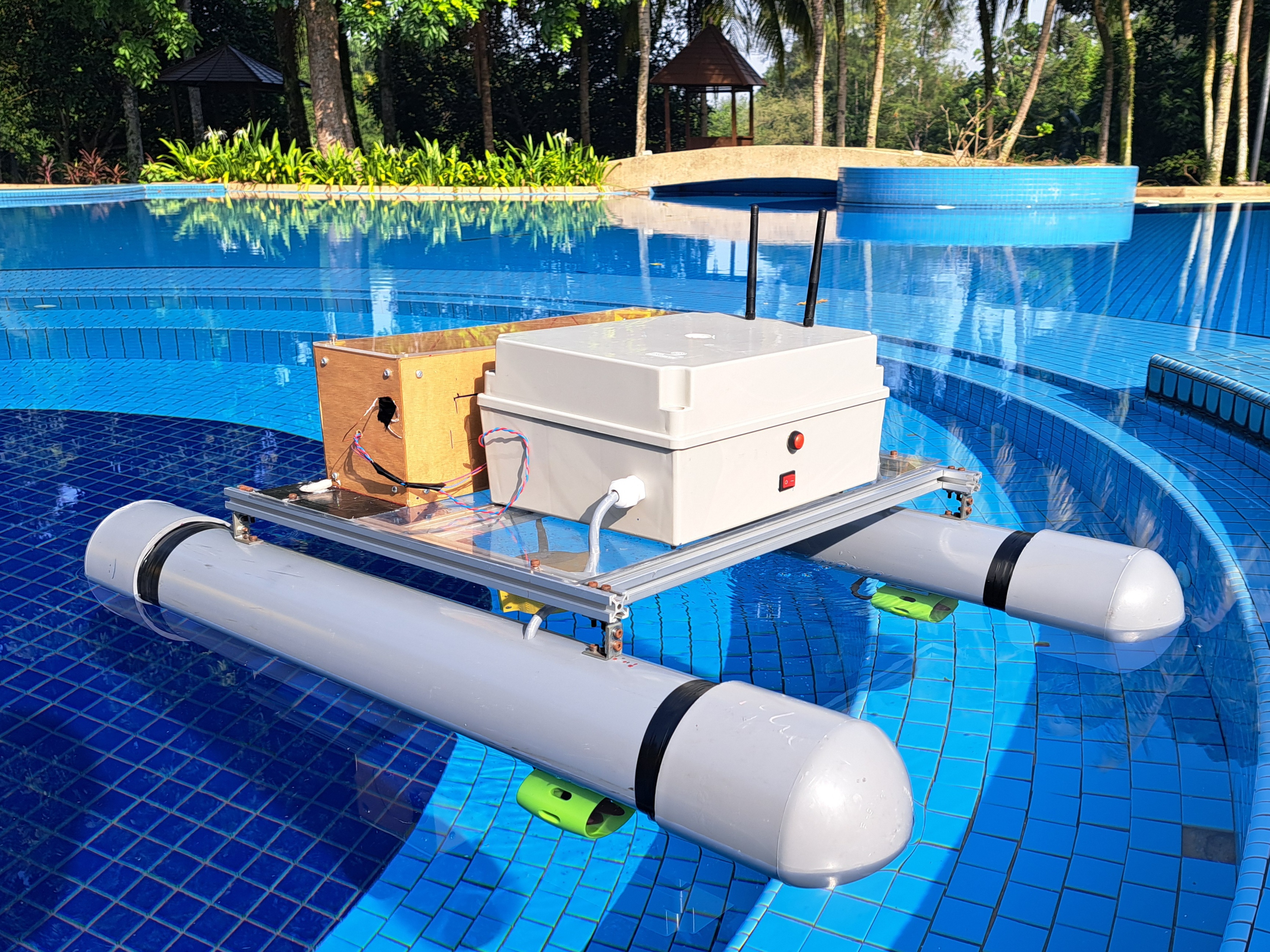
The Autonomous Vehicle for Aquatic Landscape Observation and Navigation
(AVALON) — a collaborative effort of 4 students including myself — aims to provide accessible and reliable freshwater temperature monitoring
solutions through innovative autonomous surface vehicles, empowering communities
to safeguard their freshwater resources and aquatic life.
The aim of this project was to design and develop an autonomous vehicle that is capable of
measuring subsurface water temperatures in freshwater bodies such as rivers and lakes.
PROJECT OBJECTIVES
The primary objectives of this project were:
- To build a vehicle with the ability to traverse a waterbody such as a river or a lake to obtain multiple measurements.
- To measure temperature with an accuracy of ±0.5°C as data quality is critical.
- To take three different measurements, with one at the water surface, one at the surface bed, and one at the half-way point up to a maximum depth of 3m.
- To store the temperature data along with the corresponding time, location, and depth. The stored data needs to be retrievable