PROJECT OBJECTIVES
- Complete a Track
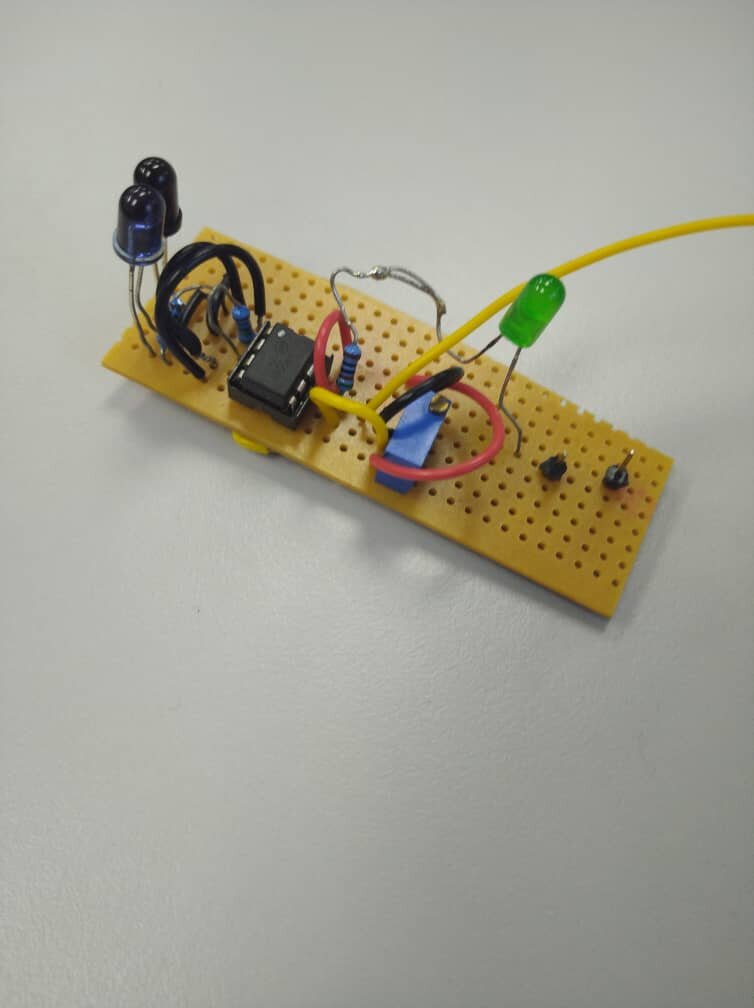
- Solder an IR Sensor
- Add additional features
COMPONENTS USED
- Arduino UNO
- IR Sensors
- SN-HC-SR04 Ultrasonic Ranging Module
- Bluetooth Serial Transceiver HC-05
- Encoder Sensors
- L289N Motor Driver
- DC Motors
- 2WD Car Chassis
SOFTWARE USED
- Arduino IDE
FUNCTIONALITY
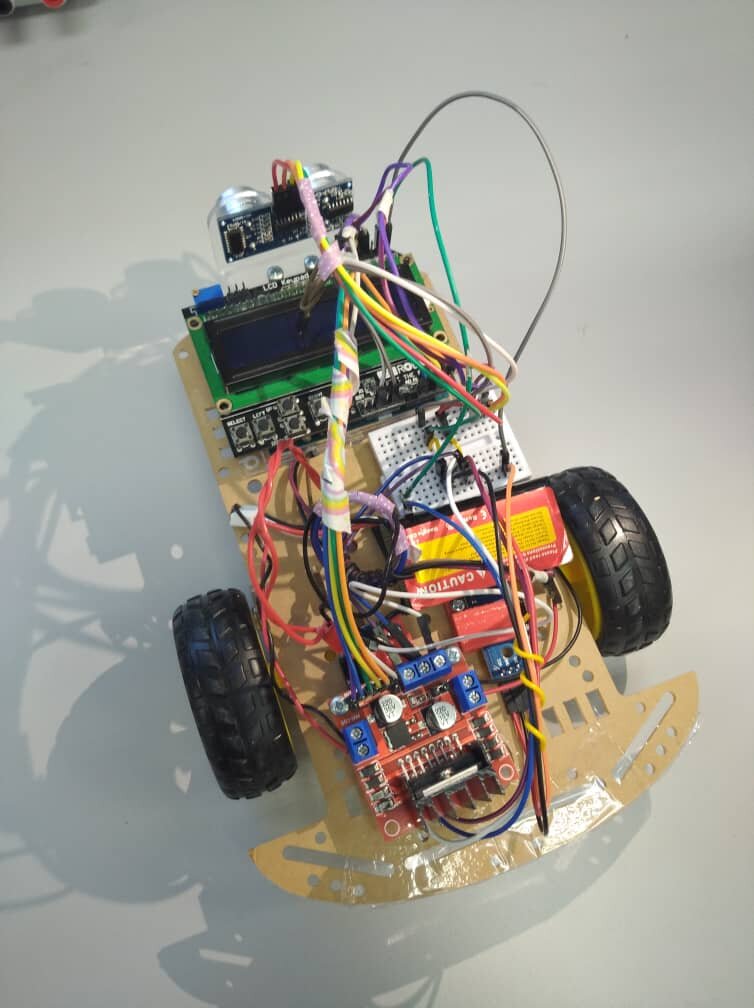
The three main objectives of this project were fulfilled after a duration of two weeks. Its capabilities consisted of completing the given track within a period of 79 seconds, and attaching additional components to the car to increase its functionality. The SN-HC-SR04 Ultrasonic Ranging Module was used in producing an obstacle-avoiding car, the Bluetooth Serial Transceiver HC-05 was used in producing a car that could be controlled via Bluetooth communication either by remote or voice command and two Encoder Sensors which calculated the distance travelled by car. The fully functional car is shown in the image above.
CHALLENGES
The biggest challenge to overcome throughout this project was during the soldering process during the troubleshooting of the light detecting circuit on the Veroboard (IR Sensor). After 3 attempts of resoldering components on multiple Veroboards, a fully functioning IR sensor was produced. From the troubleshooting process, it was found that the issues faced were that a faulty IC socket was used, and the components were not soldered properly shorting the Veroboard across. After the third attempt it was ready to be attached to the car along with another ready-made IR sensor to enable it to follow the given black line track within a period. The IR sensor was deemed fully functional after going through the same testing as the light detecting circuit.